Dresdner Forscher lassen Roboter fühlen
Die Finger greifen zu. Ganz langsam tun sie das. Dann passiert erst einmal – nichts. „Jetzt prüft er, wie stark er zugreifen kann“, sagt Ernst-Friedrich Markus Henke, der einen Meter entfernt steht und die Szenerie beobachtet. Die weißen Finger bewegen sich noch einmal wenige Millimeter. Einen winzigen Augenblick später heben sie das kleine Wachtelei von seinem gläsernen Ständer. Behutsam erfolgt der Transport in einen gepolsterten Kunststoffbehälter. Dort kullert das Ei hinein.
Ein Ei von A nach B zu bringen, das klingt erst einmal nicht spektakulär. Wenn das jedoch ein Roboterarm tut, dann ist das durchaus etwas Neues. Bisher waren die Maschinen eher für ihren starken Händedruck bekannt. Dresdner Entwickler lassen deren Finger nun fühlen.
Der Ei-Test funktioniert. Ein bisschen schneller sollen die Maschinen-Finger noch werden. Doch Henke, Geschäftsführer der PowerOn GmbH, ist zufrieden. Der Bau dieses Demonstrators war das erste große Ziel. Ein wichtiger Schritt, um zu zeigen, welche Potenzial die Idee hat. „Unsere Entwicklung verleiht Industrierobotern in Zukunft Fingerspitzengefühl“, sagt er. Die beweglichen Roboterarme, die in der Wirtschaft immer mehr zum Standard werden, sollen in Zukunft mit den fühlenden Fingern nachrüstbar sein. Damit eröffnen sich für Unternehmen ganz neue Möglichkeiten, die die Arbeit einfacher machen.
Bisher nämlich müssen die maschinellen Helfer genau trainiert werden auf das, was sie tun sollen. Ein Werkzeug, ein Bauteil oder ein fertiges Produkt greifen die Zangen des Roboters nur, weil dieser vorher gelernt hat, welche Maße das zu transportierende Gut hat und wie stark er zupacken soll. Die Maschinen sind Grobmotoriker im wahrsten Sinne des Wortes. Bei immer wieder gleich ablaufenden Arbeitsprozessen ist das unproblematisch. Doch was passiert, wenn da plötzlich etwas ganz Neues in die Zange soll?

Aus laut, steif und schwerfällig möchte das Team von PowerOn in Zukunft geräuschlos, flexibel und agil machen. Die Roboter bekommen dafür fühlende Haut, künstliche Muskeln und künstliche Neuronen. Das alles druckt das Unternehmen auf flexible Werkstoffe. Auf den weißen Kunststofffingern des Roboterarms sitzt ein weiches Silikonkissen. Darauf befindet sich eine hauchdünne Folie mit empfindlichen, aufgedruckten Sensoren. Sie lassen die Fingerspitzen fühlen, wenn sie auf die Schale des Wachteleis treffen. Der Roboter passt an, wie stark er zugreifen kann. So etwas war bisher nicht möglich.
Forschung in Deutschland und Neuseeland
Schon während seiner Promotion an der Fakultät Elektrotechnik und Informationstechnik der TU Dresden beschäftigte sich Ernst-Friedrich Markus Henke vor gut zehn Jahren mit der Idee künstlicher Muskeln. Im Jahr 2015 startete er zu einem Forschungsaufenthalt an die Universität von Auckland in Neuseeland. Ein Schritt mit weitreichenden Folgen. Mit Kollegen entwickelte er den Ansatz von elastischen und gleichzeitig intelligenten Materialien weiter, die völlig neue Roboter ermöglich. Mit der Wissenschaftlerin Katie Wilson, seinem damaligen Mentor Iain Anderson und dem Wirtschaftsexperten Ross Green gründete er 2019 die PowerOn Ltd. in Auckland.
2020 erfolgte mit Unterstützung eines Exist-Stipendiums auch die Gründung der PowerOn GmbH in Dresden. 18 Mitarbeiter in Deutschland und Neuseeland geben Robotern nun gemeinsam künstliche Haut und Muskeln. Seit 2020 ist Henke außerdem Leiter einer Nachwuchsforschungsgruppe an der TU Dresden. Die Deutsche Forschungsgemeinschaft fördert das Team im Rahmen des Emmy Noether-Programms mit zwei Millionen Euro. Ziel der Wissenschaftler: die Erforschung von Materialien und neuer Fertigungsverfahren, die flexible Robotersysteme möglich machen.

Für die Wirtschaft sind all diese Neuerungen ein Mehrwert. „Die Automatisierung schreitet in allen Industriebereichen sehr schnell voran“, sagt Sascha Teutoburg-Weiss, Ingenieur für Systemintegration bei PowerOn. Weil Roboter aber noch nicht vorsichtig und flexibel genug agieren können, erfolgen wichtige Schritte bis heute von Hand. Ein Beispiel: die Impfstoffherstellung mittels Hühner-Eiern. Die zerbrechlichen Rohstoffe fassen ausschließlich Menschen an. Weitere Anwendungsbereiche wären der Umgang mit Reagenzien, das Entpacken von Retour-Sendungen, das Ernten von Obst oder Gemüse oder auch das Greifen von Produkten aus Gummi. Letzteres ist durch das flexible Material für Industrieroboter eine große Herausforderung. „Wir haben die Chance mit unserer Entwicklung Handarbeit zu automatisieren.“
Mehrfach ausgezeichnete Idee
Das hat auch Vorteile in Fällen, in denen Mensch und Maschinen zusammenarbeiten sollen. „Wenn Sie heute mit den Fingern zwischen die Greifer eines Industrieroboters geraten, drückt die Maschine zu“, macht der PowerOn-Geschäftsführer deutlich. Sie erkennt nicht, dass statt eines Bauteils jetzt ein menschlicher Körperteil dazwischen ist. Die Folgen wären schmerzhaft. „Es hat deshalb auch sicherheitsrelevante Gründe, die Fingerspitzen eines Roboters fühlen zu lassen.“ Das trage letztlich auch dazu bei, den Menschen die Skepsis vor dem zu nehmen, was da in Sachen Interaktion mit Maschinen in Zukunft noch auf sie zukommt. Dann könnten Roboter auch bei der Pflege von Kranken oder beim Einräumen der Spülmaschine helfen.
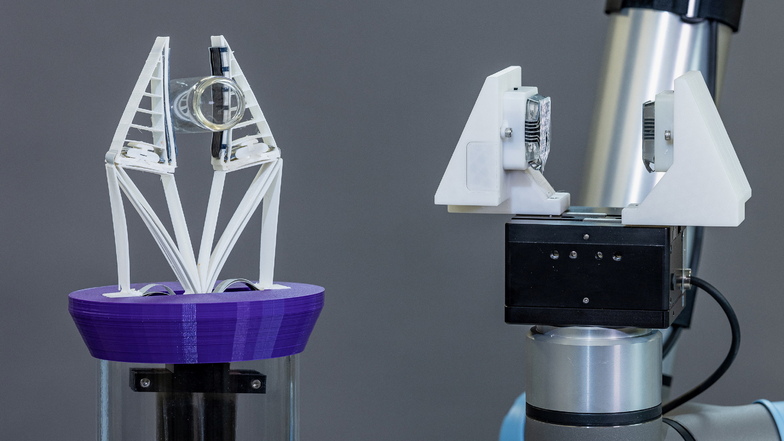
Das Wachtelei ist deshalb nur der Anfang. Die ersten Fingerspitzen für Industrieroboter zeigen, was mit bionischen Robotern möglich wäre. Ein zweiter Demonstrator von PowerOn verdeutlicht erstmals das Zusammenspiel von fühlenden Häuten, künstlichen Muskeln und künstlichen Neuronen. Der Greifer wird ausschließlich von künstlichen Muskeln angetrieben. Sie erhalten das Signal, sich zu bewegen, von einem künstlichen Neuron. Alles ist aus flexiblen Materialien hergestellt, enthält keinerlei klassische Gelenke und ist mit einer taktilen Haut ausgestattet, die erfühlen kann, wie und wo ein Objekt gegriffen wurde.
Das Potenzial der Entwicklungen von PowerOn sehen auch andere. In diesem Jahr erhielt die Firma den Start-up-Award der Stadt Dresden. Der US-amerikanische Halbleiterhersteller Intel nahm das Unternehmen in diesem Jahr in sein Start-up-Programm auf, das aus zukunftsweisenden Ideen branchenverändernde Technologien machen soll.
Wer die fühlenden Fingerspitzen einmal in Aktion sehen will, hat am Dienstag, dem 6. Dezember, zumindest online Gelegenheit dazu. Um 11 Uhr sind die PowerOn-Gründer beim halbstündigen Tech-Talk der Wirtschaftsförderung Sachsen zu Gast.